BallBot
Inverted pendulum robot that balances dynamically on a single ball using an IMU and closed-loop torque control on Dynamixel servos.
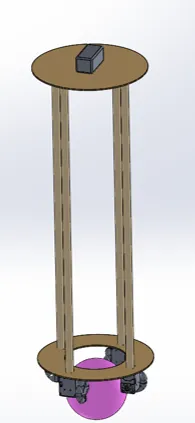
An inverted pendulum style robot that balances on a single ball, built at Georgia Tech.
The robot estimates its tilt angle from a Bosch BNO080 IMU and closes a control loop through three Dynamixel smart servos arranged to apply torque in any horizontal direction via the ball contact. The MSP432 (ARM Cortex-M4) runs the control loop in real time, communicating with the Dynamixels over their serial protocol. The chassis and ball cup were designed in CAD and fabricated using FDM and SLA 3D printers and a laser engraver.
Hardware: MSP432 (ARM M4 MCU), Dynamixel Servos, Bosch BNO080 IMU, FDM and SLA 3D Printers, Laser Engraver
Software: Code Composer Studio
Images