GROMIT
Research robot that mimics animal sniffing patterns to study machine olfaction, leading to a publication in Nature Communications.
GROMIT (Gaseous Recognition Oscillatory Machine Integrating Technology) was developed at the Hu Laboratory for Biolocomotion at Georgia Tech for testing different machine olfaction techniques. GROMIT mimics the sniffing patterns of a wide variety of animals to understand how sensor responses are affected by fluid flow dynamics. The end result was a paper published in Nature Communications.
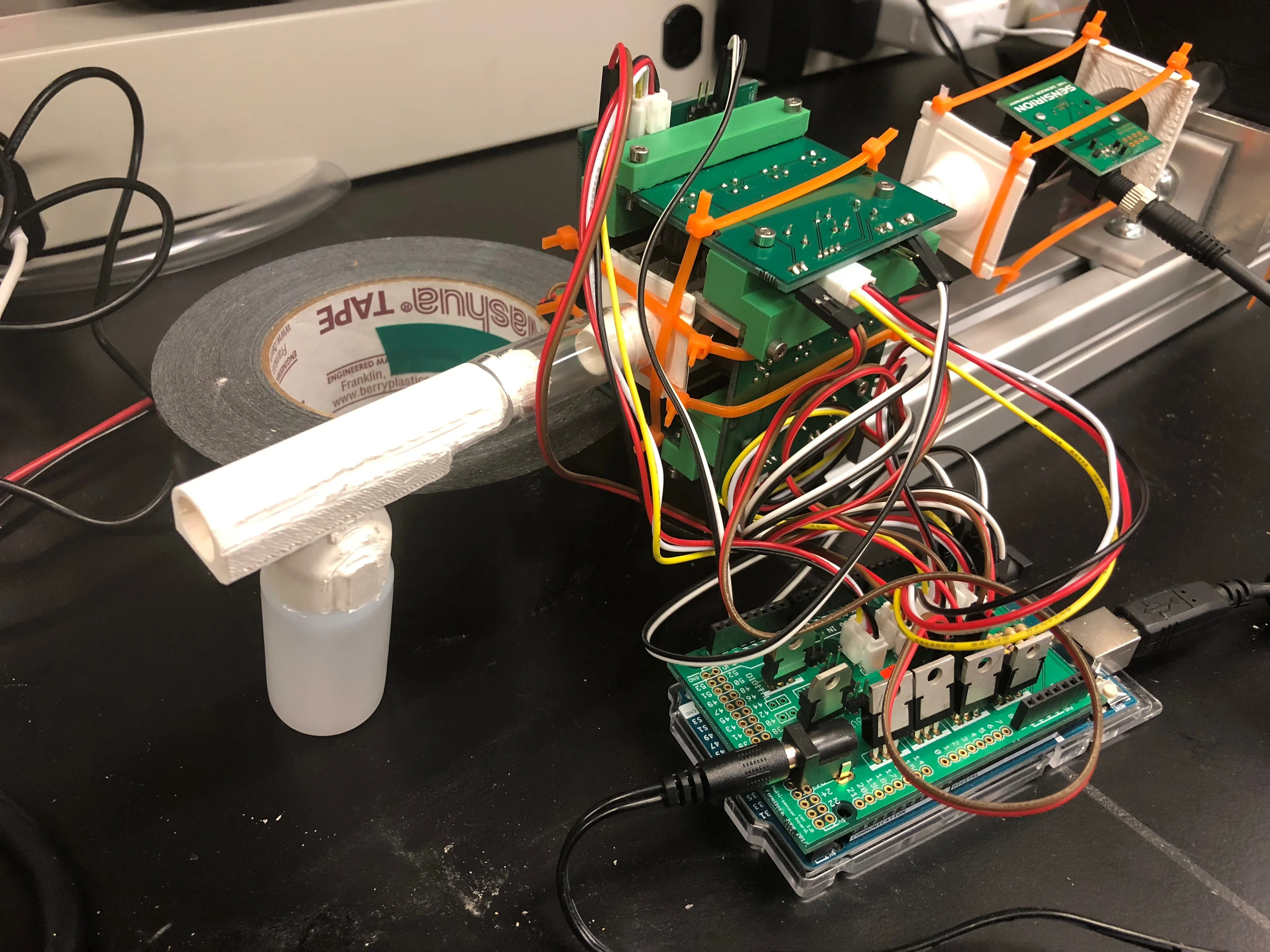
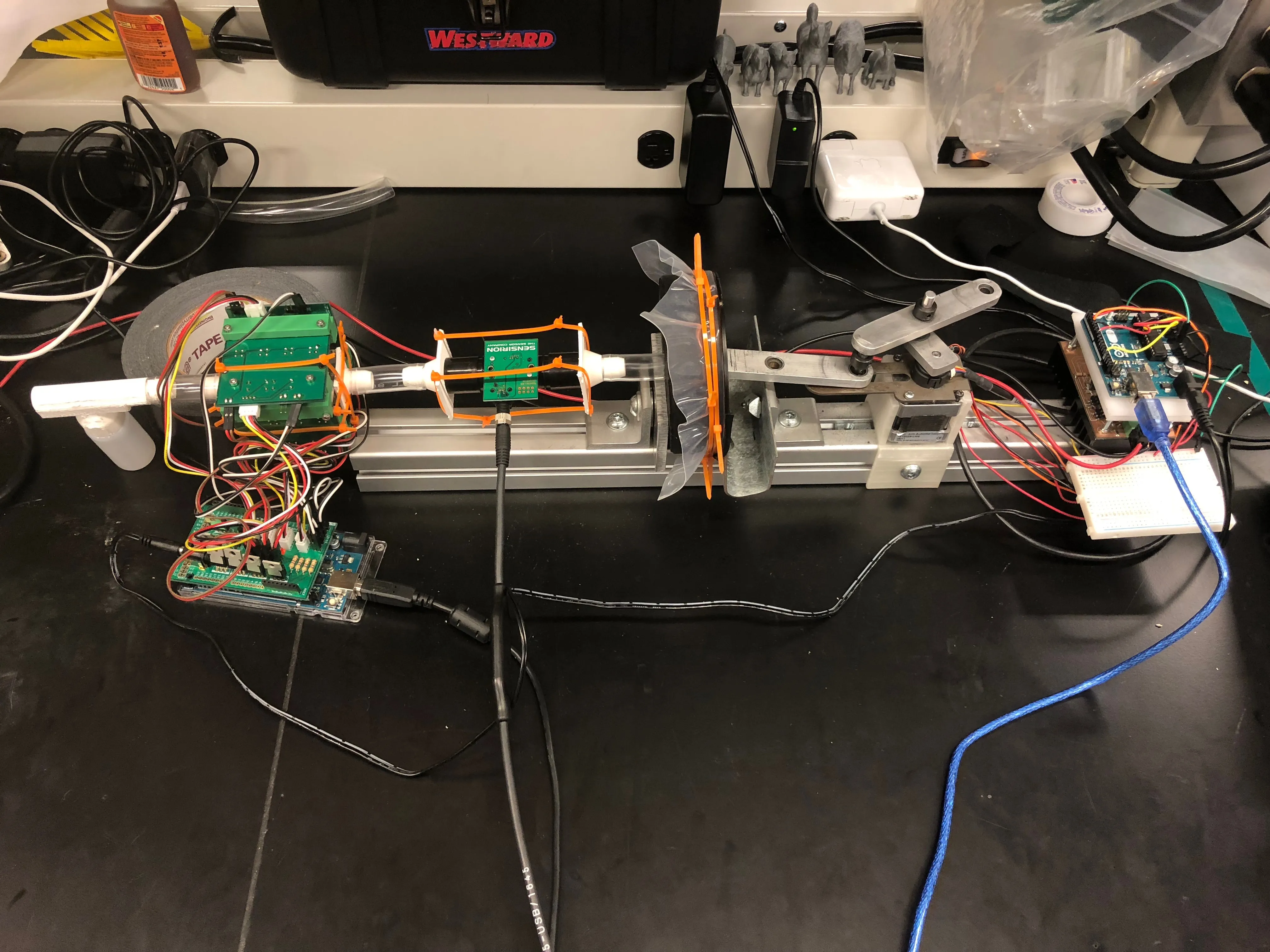
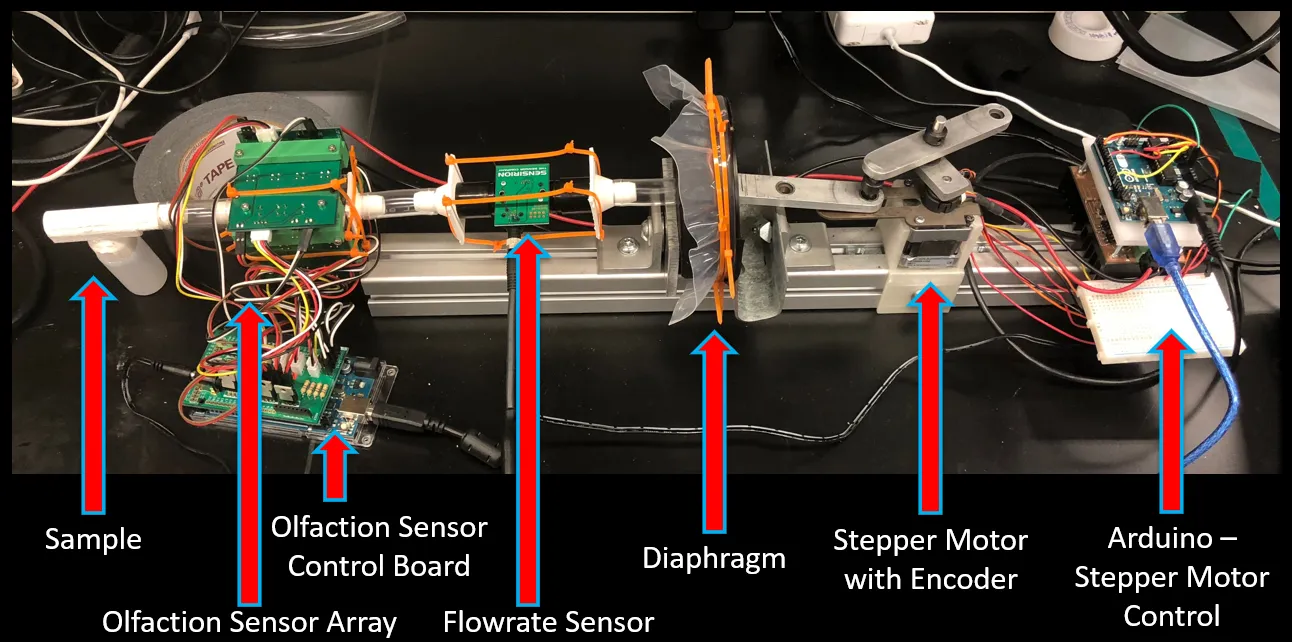
The robot uses a Nema 23 bipolar stepper motor to drive a sniffing mechanism at programmable frequencies and duty cycles, with custom metal oxide sensors and a Sensirion digital differential pressure sensor logging chemical and airflow data simultaneously. Hardware was fabricated with a combination of FDM 3D printing, waterjet cutting, and laser engraving.
Hardware: Arduino MCUs, Custom Metal Oxide Sensors, Sensirion Differential Pressure Sensor, Nema 23 Stepper Motor, FDM 3D Printer, Waterjet Cutter
Software: Arduino IDE, Sensirion USB Sensor Viewer
Publication: Nature Communications — doi:10.1038/s41467-021-21405-y
Images