Hackathing Gripper
Adaptive robotic gripper built for Georgia Tech's Hackathing competition, using ultrasonic sensing to detect and pick up a variety of objects.
January 2015
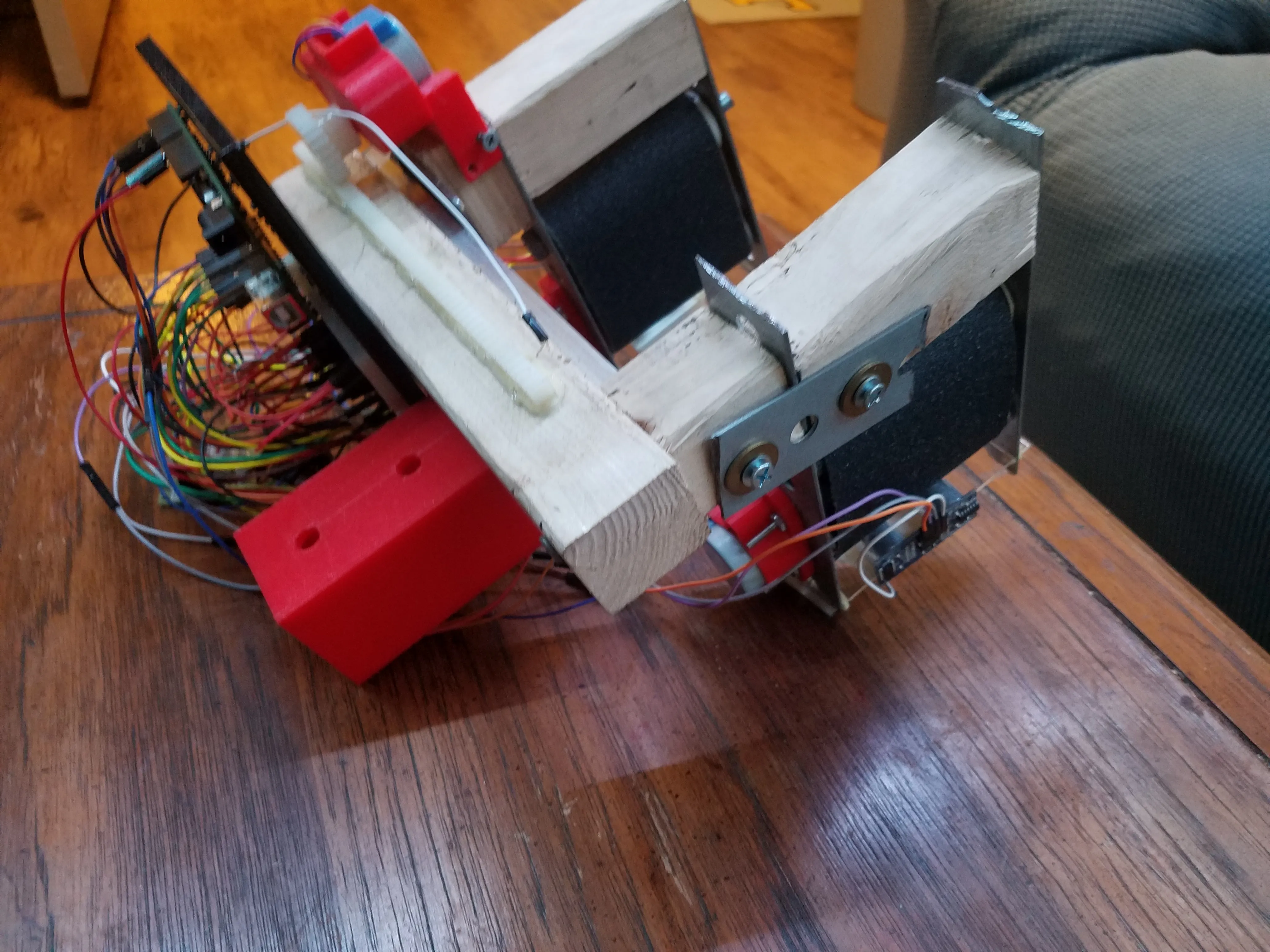
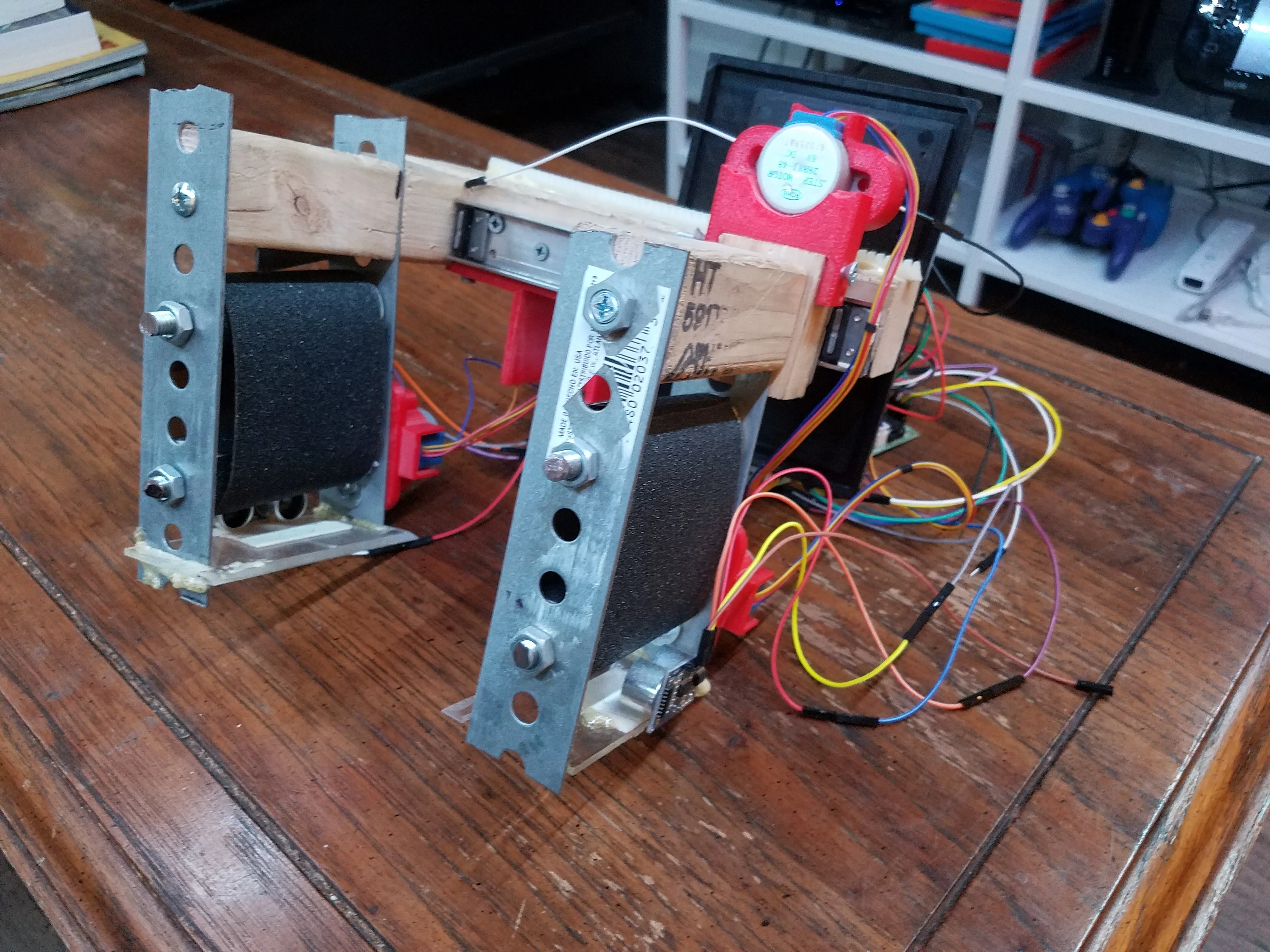
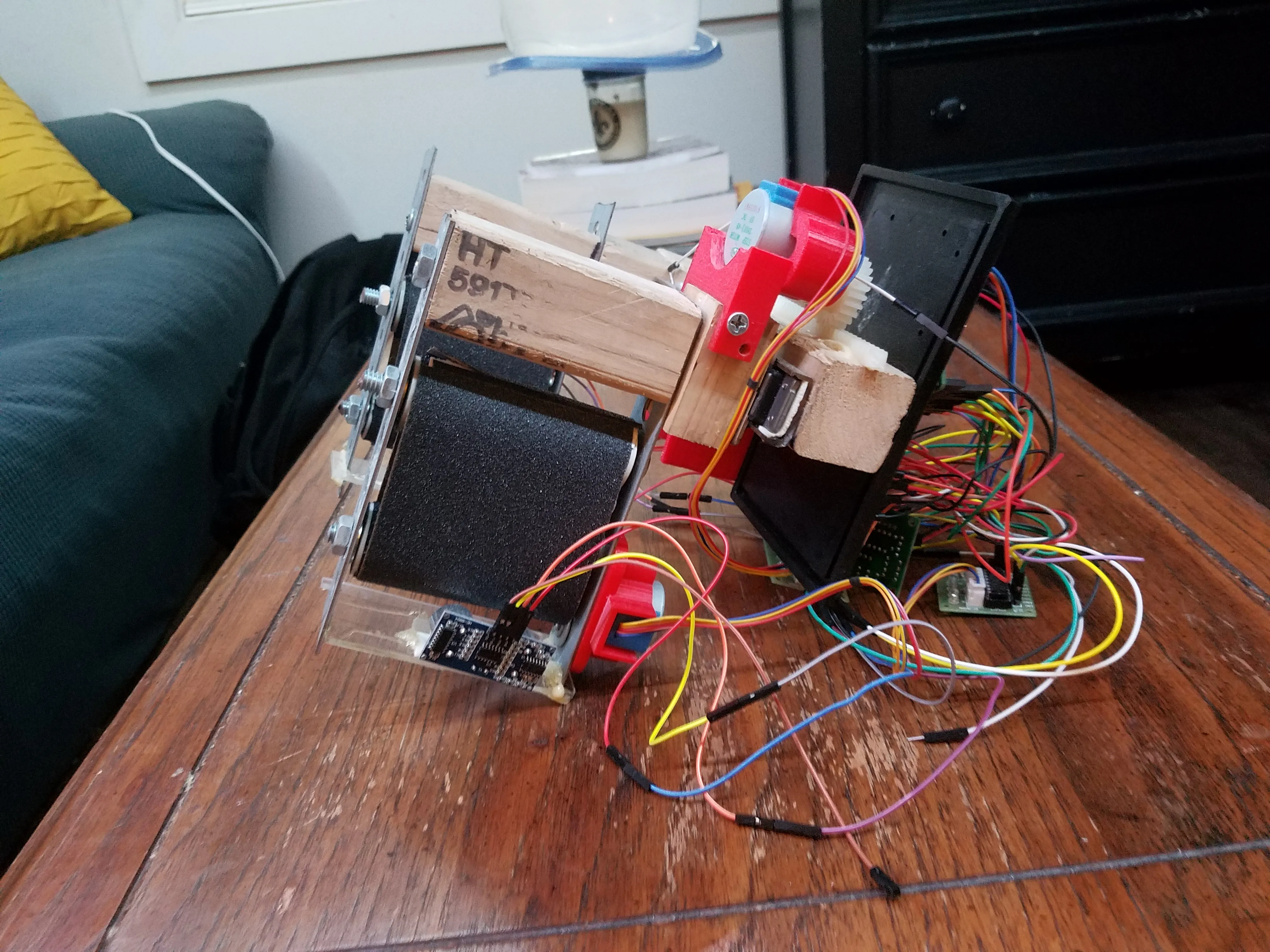
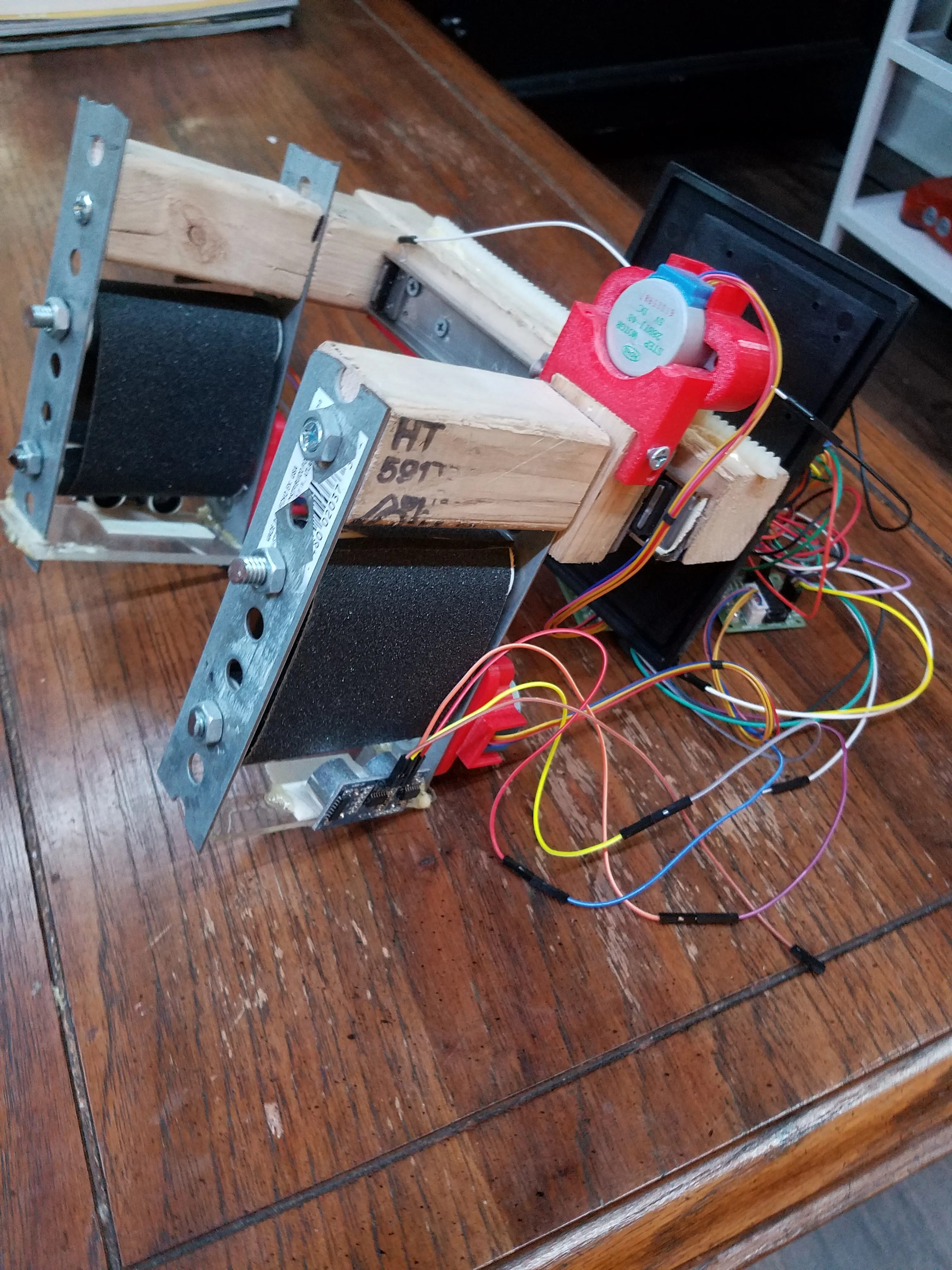
A gripper designed to pick up a variety of objects, made for Georgia Tech’s Hackathing competition.
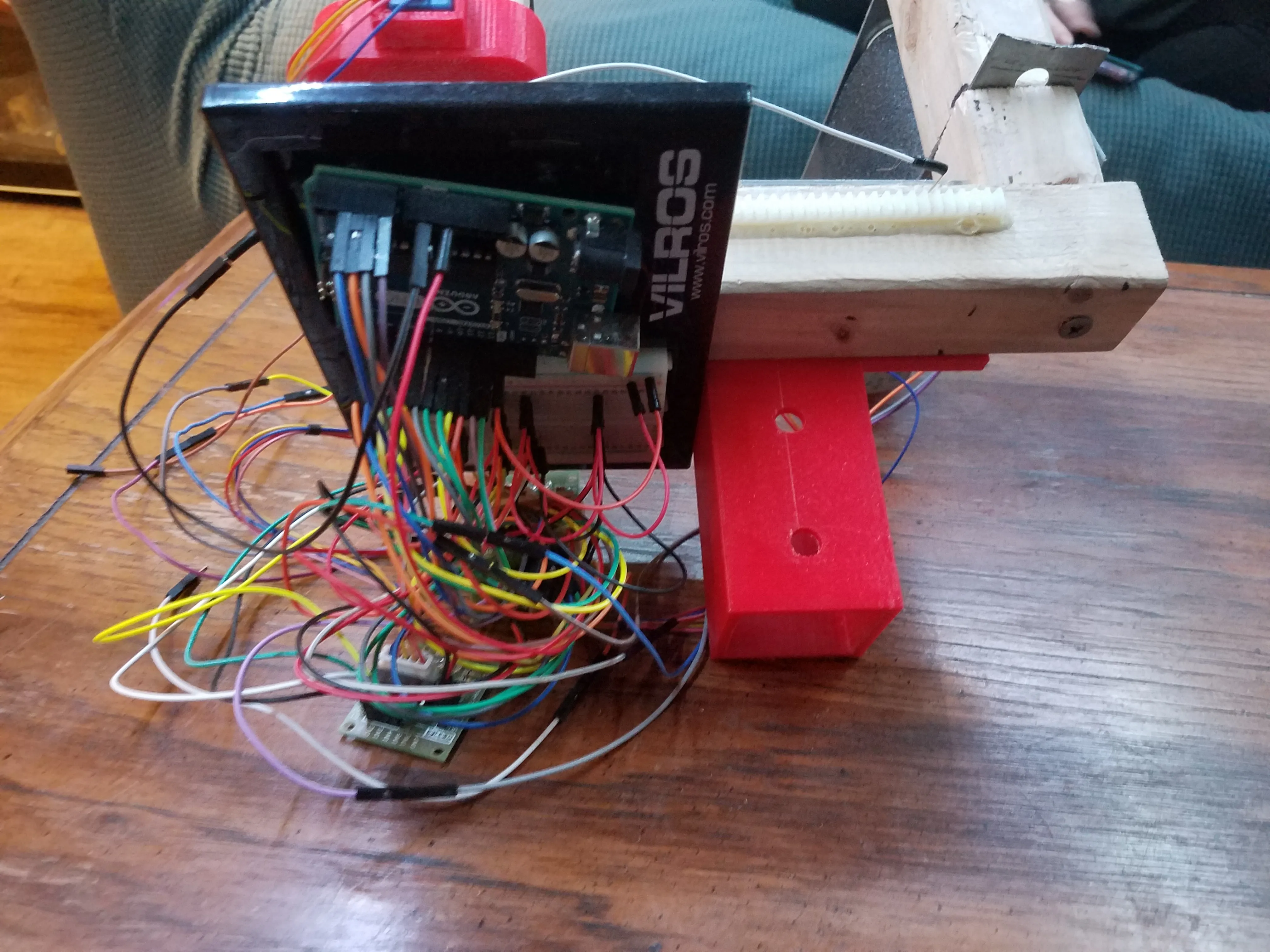
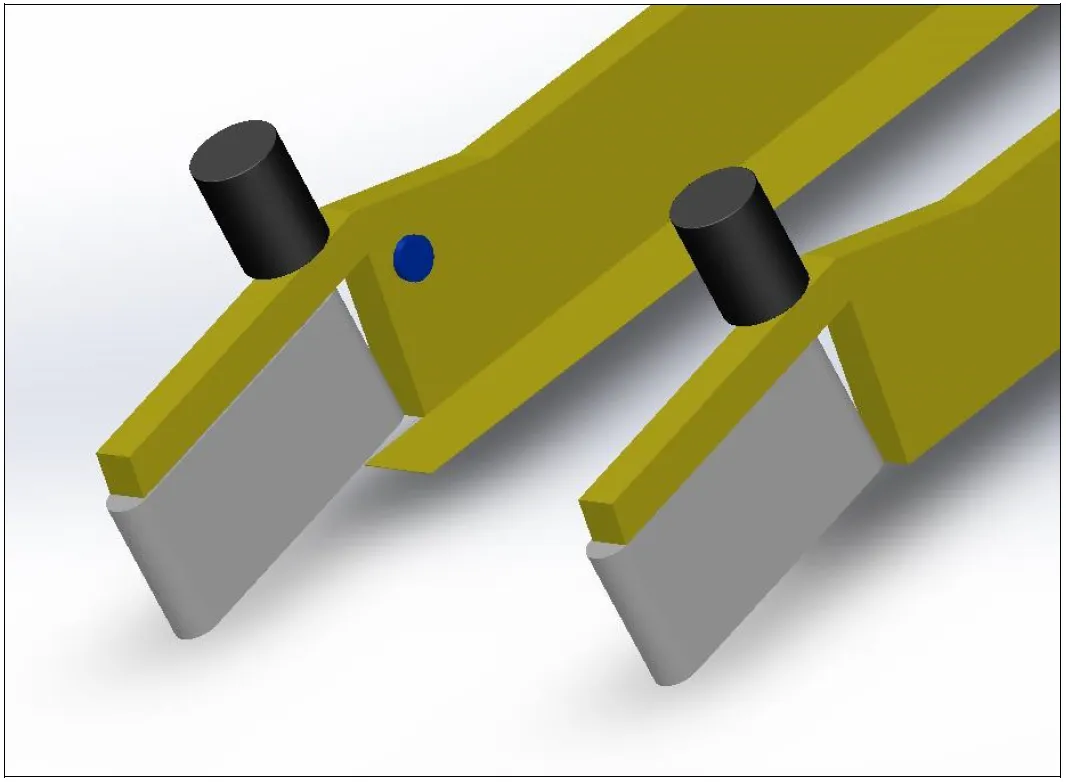
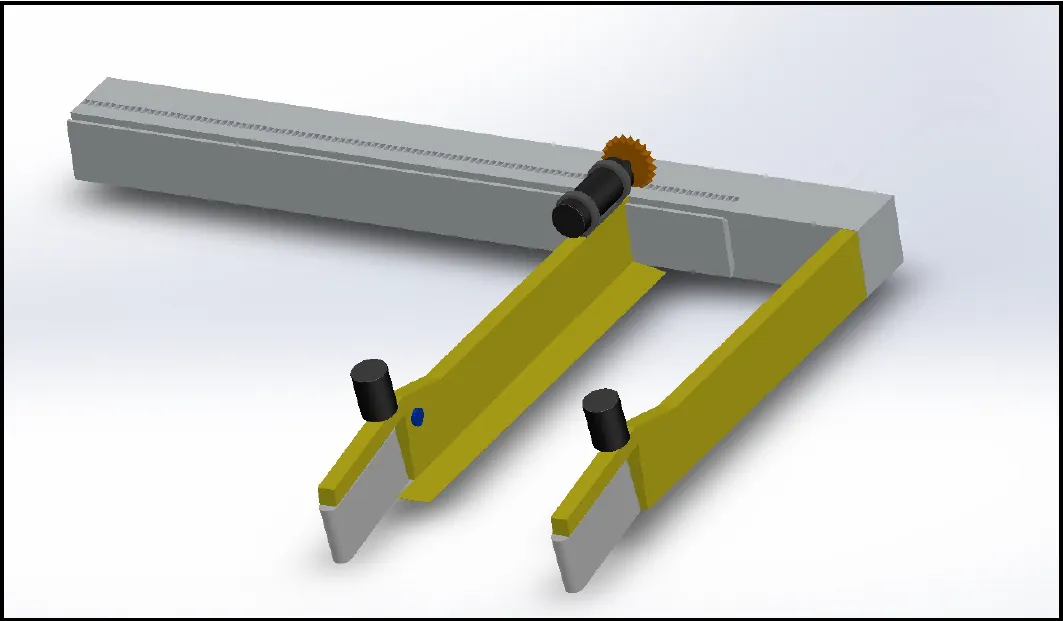
The gripper uses HC-SR04 ultrasonic sensors to detect object proximity and geometry, then drives hobby stepper motors to close the fingers to the appropriate grip width. All structural parts were designed in Autodesk Inventor and fabricated on an FDM 3D printer. The Arduino MCU handles sensor polling, motion sequencing, and closed-loop position control of the stepper axes.
Hardware: Arduino MCU, Hobby Stepper Motors, HC-SR04 Ultrasonic Sensors, FDM 3D Printer
Software: Arduino IDE, Autodesk Inventor
Images